VS14: Cooperative Adaptive Cruise Control
This service package adds vehicle to vehicle (V2V) communications to adaptive cruise control (ACC) systems, which provides enhanced information so that groups or 'strings' of CACC-equipped vehicles can follow a lead vehicle with better accuracy, quicker response, and shorter time gaps, enhancing traffic flow stability. In ACC systems, sensors (e.g., radar or lidar) and longitudinal control automation are used to measure and maintain a safe distance from the lead vehicle. Sensors may also detect vulnerable users and obstacles near the vehicle's path. V2V communications enables direct communication between the vehicles so that acceleration and deceleration can be more directly coordinated between vehicles in the string.
Relevant Regions: Australia, Canada, European Union, and United States
- Enterprise
- Functional
- Physical
- Goals and Objectives
- Needs and Requirements
- Sources
- Security
- Standards
- System Requirements
Enterprise
Development Stage Roles and Relationships
Installation Stage Roles and Relationships
Operations and Maintenance Stage Roles and Relationships
(hide)
| Source | Destination | Role/Relationship |
|---|---|---|
| Basic Vehicle Maintainer | Basic Vehicle | Maintains |
| Basic Vehicle Manager | Basic Vehicle | Manages |
| Basic Vehicle Manager | Driver | System Usage Agreement |
| Basic Vehicle Owner | Basic Vehicle Maintainer | System Maintenance Agreement |
| Basic Vehicle Owner | Basic Vehicle Manager | Operations Agreement |
| Basic Vehicle Owner | Driver | Application Usage Agreement |
| Basic Vehicle Owner | Driver | Vehicle Operating Agreement |
| Basic Vehicle Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Basic Vehicle Owner | Vehicle Owner | Expectation of Data Provision |
| Basic Vehicle Owner | Vehicle User | Service Usage Agreement |
| Basic Vehicle Supplier | Basic Vehicle Owner | Warranty |
| Driver | Basic Vehicle | Operates |
| Driver | Roadway Owner | Expectation of Roadway Condition Management |
| Driver | Vehicle | Operates |
| Other Vehicles Maintainer | Other Vehicles | Maintains |
| Other Vehicles Manager | Other Vehicles | Manages |
| Other Vehicles Owner | Driver | Application Usage Agreement |
| Other Vehicles Owner | Driver | Vehicle Operating Agreement |
| Other Vehicles Owner | Other Vehicles Maintainer | System Maintenance Agreement |
| Other Vehicles Owner | Other Vehicles Manager | Operations Agreement |
| Other Vehicles Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Other Vehicles Owner | Vehicle Owner | Expectation of Data Provision |
| Other Vehicles Owner | Vehicle User | Service Usage Agreement |
| Other Vehicles Supplier | Other Vehicles Owner | Warranty |
| Roadway Maintainer | Roadway Environment | Maintains |
| Roadway Manager | Roadway Environment | Manages |
| Roadway Owner | Roadway Maintainer | System Maintenance Agreement |
| Roadway Owner | Roadway Manager | Operations Agreement |
| Vehicle Characteristics Maintainer | Vehicle Characteristics | Maintains |
| Vehicle Characteristics Manager | Vehicle Characteristics | Manages |
| Vehicle Characteristics Owner | Vehicle Characteristics Maintainer | System Maintenance Agreement |
| Vehicle Characteristics Owner | Vehicle Characteristics Manager | Operations Agreement |
| Vehicle Characteristics Supplier | Vehicle Characteristics Owner | Warranty |
| Vehicle Maintainer | Vehicle | Maintains |
| Vehicle Manager | Driver | System Usage Agreement |
| Vehicle Manager | Vehicle | Manages |
| Vehicle Owner | Basic Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Vehicle Owner | Basic Vehicle Owner | Expectation of Data Provision |
| Vehicle Owner | Basic Vehicle User | Service Usage Agreement |
| Vehicle Owner | Driver | Application Usage Agreement |
| Vehicle Owner | Driver | Vehicle Operating Agreement |
| Vehicle Owner | Other Vehicles Maintainer | Maintenance Data Exchange Agreement |
| Vehicle Owner | Other Vehicles Owner | Expectation of Data Provision |
| Vehicle Owner | Other Vehicles User | Service Usage Agreement |
| Vehicle Owner | Vehicle Maintainer | System Maintenance Agreement |
| Vehicle Owner | Vehicle Manager | Operations Agreement |
| Vehicle Supplier | Vehicle Owner | Warranty |
Functional
This service package includes the following Functional View PSpecs:
Physical
The physical diagram can be viewed in SVG or PNG format and the current format is SVG.SVG Diagram
PNG Diagram
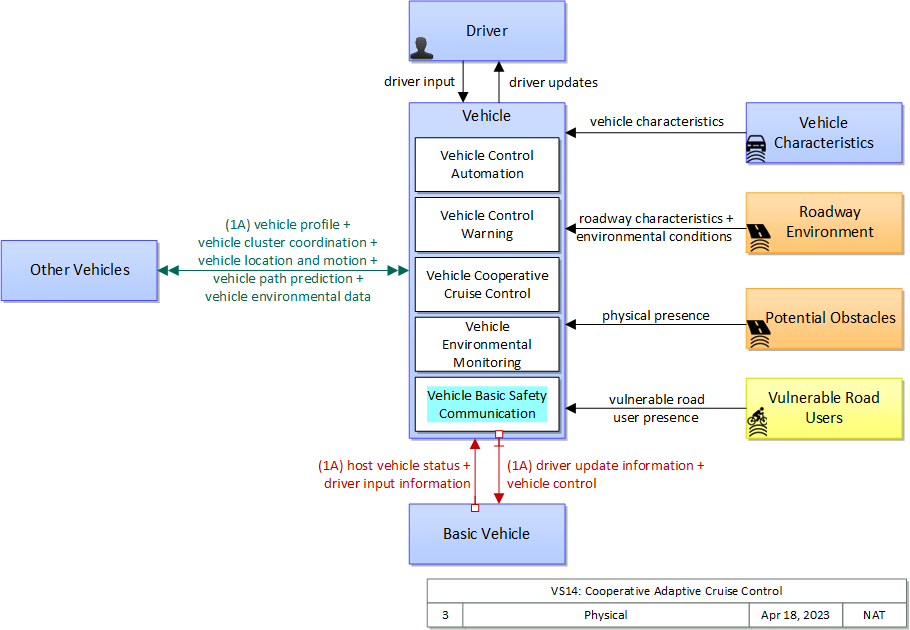
Includes Physical Objects:
| Physical Object | Class | Description |
|---|---|---|
| Basic Vehicle | Vehicle | 'Basic Vehicle' represents a complete operating vehicle. It includes the vehicle platform that interfaces with and hosts ITS electronics and all of the driver convenience and entertainment systems, and other non-ITS electronics on-board the vehicle. Interfaces represent both internal on-board interfaces between ITS equipment and other vehicle systems and other passive and active external interfaces or views of the vehicle that support vehicle/traffic monitoring and management. External interfaces may also represent equipment that is carried into the vehicle (e.g., a smartphone that is brought into the vehicle). Internal interfaces are often implemented through a vehicle databus, which is also included in this object. Note that 'Vehicle' represents the general functions and interfaces that are associated with personal automobiles as well as commercial vehicles, emergency vehicles, transit vehicles, and other specialized vehicles. |
| Driver | Vehicle | The 'Driver' represents the person that operates a vehicle on the roadway. Included are operators of private, transit, commercial, and emergency vehicles where the interactions are not particular to the type of vehicle (e.g., interactions supporting vehicle safety applications). The Driver originates driver requests and receives driver information that reflects the interactions which might be useful to all drivers, regardless of vehicle classification. Information and interactions which are unique to drivers of a specific vehicle type (e.g., fleet interactions with transit, commercial, or emergency vehicle drivers) are covered by separate objects. |
| Other Vehicles | Vehicle | 'Other Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. This object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Other Vehicle OBEs to model all connected vehicle V2V communications in ARC-IT. |
| Potential Obstacles | Field | 'Potential Obstacles' represents any object that possesses the potential of being sensed and struck and thus also possesses physical attributes. Potential Obstacles include roadside obstructions, debris, animals, infrastructure elements (barrels, cones, barriers, etc.) or any other element that is in a potential path of the vehicle. Note that roadside objects and pieces of equipment that can become obstacles in a vehicle's path can include materials, coatings, or labels (e.g., barcodes) that will improve the performance of the vehicle-based sensors that must detect and avoid these obstacles. See also 'Vulnerable Road Users' that more specifically represents the physical properties of shared users of the roadway that must also be detected. |
| Roadway Environment | Field | 'Roadway Environment' represents the physical condition and geometry of the road surface, markings, signs, and other objects on or near the road surface. It also represents the environmental conditions immediately surrounding the roadway. The roadway environment must be sensed and interpreted to support automated vehicle services. Surrounding conditions may include fog, ice, snow, rain, wind, etc. which will influence the way in which a vehicle can be safely operated on the roadway. The roadway environment must be monitored to enable corrective action and information dissemination regarding roadway conditions which may adversely affect travel. Infrastructure owner/operators can improve the roadway environment to improve the performance and accuracy of vehicle-based sensors that must sense and interpret this environment. Improvements could include changes in the shape, size, design, and materials used in signs, pavement markings, and other road features. |
| Vehicle | Vehicle | This 'Vehicle' physical object is used to model core capabilities that are common to more than one type of Vehicle. It provides the vehicle-based general sensory, processing, storage, and communications functions that support efficient, safe, and convenient travel. Many of these capabilities (e.g., see the Vehicle Safety service packages) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle includes the common interfaces and functions that apply to all motorized vehicles. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle. Both one-way and two-way communications options support a spectrum of information services from basic broadcast to advanced personalized information services. Advanced sensors, processors, enhanced driver interfaces, and actuators complement the driver information services so that, in addition to making informed mode and route selections, the driver travels these routes in a safer and more consistent manner. This physical object supports all six levels of driving automation as defined in SAE J3016. Initial collision avoidance functions provide 'vigilant co-pilot' driver warning capabilities. More advanced functions assume limited control of the vehicle to maintain lane position and safe headways. In the most advanced implementations, this Physical Object supports full automation of all aspects of the driving task, aided by communications with other vehicles in the vicinity and in coordination with supporting infrastructure subsystems. |
| Vehicle Characteristics | Vehicle | 'Vehicle Characteristics' represents the external view of individual vehicles of any class from cars and light trucks up to large commercial vehicles and down to micromobility vehicles (MMVs). It includes vehicle physical characteristics such as height, width, length, weight, and other properties (e.g., magnetic properties, number of axles) of individual vehicles that can be sensed and measured or classified. This physical object represents the physical properties of vehicles that can be sensed by vehicle-based or infrastructure-based sensors to support vehicle automation and traffic sensor systems. The analog properties provided by this terminator represent the sensor inputs that are used to detect and assess vehicle(s) within the sensor's range to support safe AV operation and/or responsive and safe traffic management. |
| Vulnerable Road Users | Personal | 'Vulnerable Road Users' represents any roadway user not in a motorized vehicle capable of operating at the posted speed for the roadway in question, and also any roadway user in a vehicle not designed to encase (and thus protect) its occupants. This includes pedestrians, cyclists, wheelchair users, two-wheeled scooter micromobility users, as well as powered scooters and motorcycles. Note that this terminator represents the physical properties of vulnerable road users and their conveyance that may be sensed to support safe vehicle automation and traffic management in mixed mode applications where a variety of road users share the right-of-way. See also 'Pedestrian' and 'MMV User' Physical Objects that represent the human interface to these vulnerable road users. |
Includes Functional Objects:
| Functional Object | Description | Physical Object |
|---|---|---|
| Vehicle Basic Safety Communication | 'Vehicle Basic Safety Communication' exchanges current vehicle characteristics, location, and motion (including past and intended maneuver) information with other vehicles in the vicinity, uses that information to calculate vehicle paths, and warns the driver when the potential for an impending collision is detected. If available, map data is used to filter and interpret the relative location and motion of vehicles in the vicinity. Information from on-board sensors (e.g., radars and image processing) are also used, if available, in combination with the V2V communications to detect non-equipped vehicles and corroborate connected vehicle data. This object represents a broad range of implementations ranging from basic Vehicle Awareness Devices that only broadcast vehicle location and motion and provide no driver warnings to advanced integrated safety systems that coordinate maneuvers and may, in addition to warning the driver, provide collision warning information to support automated control functions that can support control intervention. | Vehicle |
| Vehicle Control Automation | 'Vehicle Control Automation' provides lateral and/or longitudinal control of a vehicle to allow 'hands off' and/or 'feet off' driving, automating the steering, accelerator, and brake control functions. It builds on the sensors included in 'Vehicle Safety Monitoring' and 'Vehicle Control Warning' and uses the information about the area surrounding the vehicle to safely control the vehicle. It covers the range of incremental control capabilities from driver assistance systems that take over steering or acceleration/deceleration in limited scenarios with direct monitoring by the driver to full automation where all aspects of driving are automated under all roadway and environmental conditions. | Vehicle |
| Vehicle Control Warning | 'Vehicle Control Warning' monitors areas around the vehicle and provides warnings to a driver so the driver can take action to recover and maintain safe control of the vehicle. It includes lateral warning systems that warn of lane departures and obstacles or vehicles to the sides of the vehicle and longitudinal warning systems that monitor areas in the vehicle path and provide warnings when headways are insufficient or obstacles are detected in front of or behind the vehicle. It includes on-board sensors, including radars and imaging systems, and the driver information system that provides the visual, audible, and/or haptic warnings to the driver. | Vehicle |
| Vehicle Cooperative Cruise Control | 'Vehicle Cooperative Cruise Control' uses V2V communications to share speeds and coordinate maneuvers with adjacent vehicles in the same lane (a CACC 'string'), maintaining vehicle speed and a safe gap with the predecessor vehicle. It provides the capability for vehicles to cluster into strings of CACC-equipped vehicles with compatible performance characteristics and share speed, location, acceleration/deceleration, path predictions (e.g., intended acceleration/deceleration) with other vehicles in the string. These capabilities are provided by systems on board the vehicle that coordinate with other vehicles and control acceleration and braking. In advanced implementations, the capability to coordinate with the infrastructure to support more advanced clustering strategies and use infrastructure provided target speed and traffic control information to improve performance. | Vehicle |
| Vehicle Environmental Monitoring | 'Vehicle Environmental Monitoring' collects data from on-board sensors and systems related to environmental conditions and sends the collected data to the infrastructure as the vehicle travels. The collected data is a byproduct of vehicle safety and convenience systems and includes ambient air temperature and precipitation measures and status of the wipers, lights, ABS, and traction control systems. | Vehicle |
Includes Information Flows:
| Information Flow | Description |
|---|---|
| driver input | Driver input to the vehicle on-board equipment including configuration data, settings and preferences, interactive requests, and control commands. |
| driver input information | Driver input received from the driver-vehicle interface equipment via the vehicle bus. It includes configuration data, settings and preferences, interactive requests, and control commands for the connected vehicle on-board equipment. |
| driver update information | Information provided to the driver-vehicle interface to inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. The flow includes the information to be presented to the driver and associated metadata that supports processing, prioritization, and presentation by the DVI as visual displays, audible information and warnings, and/or haptic feedback. |
| driver updates | Information provided to the driver including visual displays, audible information and warnings, and haptic feedback. The updates inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. |
| environmental conditions | Current road conditions (e.g., surface temperature, subsurface temperature, moisture, icing, treatment status) and surface weather conditions (e.g., air temperature, wind speed, precipitation, visibility) that are measured by environmental sensors. |
| host vehicle status | Information provided to the ITS on-board equipment from other systems on the vehicle platform. This includes the current status of the powertrain, steering, and braking systems, and status of other safety and convenience systems. In implementations where GPS is not integrated into the Vehicle On-Board Equipment, the host vehicle is also the source for data describing the vehicle's location in three dimensions (latitude, longitude, elevation) and accurate time that can be used for time synchronization across the ITS environment. |
| physical presence | Detection of an obstacle. Obstacle could include animals, incident management and construction elements such as cones, barrels and barriers, rocks in roadway, etc. |
| roadway characteristics | Detectable or measurable road characteristics such as friction coefficient and general surface conditions, road geometry and markings, etc. These characteristics are monitored or measured by ITS sensors and used to support advanced vehicle safety and control and road maintenance capabilities. |
| vehicle characteristics | The physical or visible characteristics of individual vehicles that can be used to detect, classify, and monitor vehicles and imaged to uniquely identify vehicles. |
| vehicle cluster coordination | Coordination between CACC-equipped vehicles that enable formation and management of strings of adjacent equipped vehicles that coordinate speed management across the string. This flow includes coordination between CACC-equipped vehicles that enable adjacent vehicles in the same lane to identify each other and couple. Depending on the CACC implementation, this flow also supports identification of the lead vehicle in the string, operating performance parameters for the string, destination information so that drivers can join strings that share their destination, and coordination so that strings of vehicles are ordered based on the individual weight and performance profile of each participating vehicle. This flow also supports dissolution of CACC vehicle strings as vehicles depart from the string. |
| vehicle control | Control commands issued to vehicle actuators that control steering, throttle, and braking and other related commands that support safe transition between manual and automated vehicle control. This flow can also deploy restraints and other safety systems when a collision is unavoidable. |
| vehicle environmental data | Data from vehicle safety and convenience systems that can be used to estimate environmental and infrastructure conditions, including measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti-lock brake status, vertical acceleration and other collected vehicle system status and sensor information. The collected data is reported along with the location, heading, and time that the data was collected. Both current data and snapshots of recent events (e.g., traction control or anti-lock brake system activations) may be reported. |
| vehicle location and motion | Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. |
| vehicle path prediction | The predicted future vehicle path of travel. This flow includes an indication of the future positions of the transmitting vehicle that can be used by receiving vehicles to support coordinated driving maneuvers and enhance in-lane and out-of-lane threat classification. |
| vehicle profile | Information about a vehicle such as vehicle make and model, fuel type, engine type, size and weight, vehicle performance and level of control automation, average emissions, average fuel consumption, passenger occupancy, or other data that can be used to classify vehicle eligibility for access to specific lanes, road segments, or regions or participation in cooperative vehicle control applications. |
| vulnerable road user presence | Detection of pedestrians, cyclists, and other vulnerable road users. This detection is based on physical characteristics of the user and their conveyance, which may be enhanced by design and materials that facilitate sensor-based detection and tracking of vulnerable road users. |
Goals and Objectives
Associated Planning Factors and Goals
| Planning Factor | Goal |
|---|---|
| A. Support the economic vitality of the metropolitan area, especially by enabling global competitiveness, productivity, and efficiency; | Improve freight network |
| B. Increase the safety of the transportation system for motorized and nonmotorized users; | Reduce fatalities and injuries |
| D. Increase the accessibility and mobility of people and for freight; | Reduce congestion |
| E. Protect and enhance the environment, promote energy conservation, improve the quality of life, and promote consistency between transportation improvements and State and local planned growth and economic development patterns; | Protect/Enhance the Environment |
| G. Promote efficient system management and operation; | Improve efficiency |
Associated Objective Categories 
Associated Objectives and Performance Measures
Needs and Requirements
| Need | Functional Object | Requirement | ||
|---|---|---|---|---|
| 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. | Vehicle Basic Safety Communication | 02 | The vehicle shall provide its location with lane-level accuracy to on-board applications. |
| 05 | The vehicle shall calculate vehicle paths in order to determine if an impending collision is detected. | |||
| 06 | The vehicle shall exchange location and motion information with roadside equipment and nearby vehicles. | |||
| Vehicle Control Warning | 01 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | ||
| 02 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | |||
| Vehicle Cooperative Cruise Control | 04 | The vehicle shall be capable of joining a platoon by determining the recommended platoon entry location and the timing for the vehicle to enter a platoon. | ||
| 06 | The vehicle shall communicate the current speed and gap policy to the driver interface system for display to the driver. | |||
| 09 | The vehicle shall provide a means for the driver to accept, reject, and modify a given speed and gap policy. | |||
| 20 | The Vehicle shall provide its location with lane-level accuracy to on-board cooperative cruise control applications. | |||
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. | Vehicle Basic Safety Communication | 02 | The vehicle shall provide its location with lane-level accuracy to on-board applications. |
| 05 | The vehicle shall calculate vehicle paths in order to determine if an impending collision is detected. | |||
| 06 | The vehicle shall exchange location and motion information with roadside equipment and nearby vehicles. | |||
| 08 | The vehicle shall warn the driver of an Emergency Electronic Brake Light (EEBL) Event. | |||
| 09 | The vehicle shall determine when its host Vehicle is braking in an emergency fashion and broadcast an Emergency Electronic Brake Light (EEBL) notification. | |||
| 10 | The vehicle shall determine the status of host vehicle systems including vehicle speed, heading, yaw, wheelspin, ABS, traction control, and wiper status. | |||
| 11 | The vehicle shall determine if vehicle systems status indicates a potentially hazardous road condition. | |||
| Vehicle Control Automation | 04 | The vehicle shall collect location and motion data from the vehicle platform. | ||
| 08 | The vehicle shall provide an interface through which a vehicle driver can initiate, monitor and terminate automatic control of the vehicle. | |||
| 09 | The vehicle shall send appropriate control actions to the vehicle's steering actuators. | |||
| Vehicle Control Warning | 01 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | ||
| 02 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | |||
| 09 | The vehicle shall collect location and motion data from the vehicle platform. | |||
| Vehicle Cooperative Cruise Control | 03 | The vehicle shall exchange movement data (time, location, velocity, forward gap, heading, acceleration) with other vehicles via V2V communications. | ||
| 05 | The vehicle shall coordinate acceleration and braking with adjacent vehicles in the same lane (a platoon), maintaining vehicle speed and a safe gap with the vehicle in front of it. | |||
| 10 | The vehicle shall exchange data with other vehicles in the platoon to share vehicle status information, roadway condition data, and initiate vehicle actuator controls to maintain safe following distances. | |||
| Vehicle Environmental Monitoring | 01 | The vehicle shall collect and process environmental sensor data, including air temperature and rain sensors. | ||
| 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. | Vehicle Cooperative Cruise Control | 11 | The vehicle shall determine recommended platoon exit location and timing for the vehicle to exit a platoon. |
| 12 | The vehicles shall determine the appropriate time to restore longitudinal vehicle control to the driver upon CACC platoon exit. | |||
| 13 | The vehicle shall allow the vehicle to leave the platoon if cruise control is disabled. | |||
| 14 | The vehicle shall allow the vehicle to leave the platoon based on driver input of desire to leave. | |||
| 15 | The vehicle shall exchange weather data (time, location, external air temperature, barometric pressure, wiper status, headlight status), road surface data (time, location, traction control status, stability control status, differential wheel speed) with other connected vehicles to support platoon operations. | |||
| 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. | Vehicle Control Automation | 04 | The vehicle shall collect location and motion data from the vehicle platform. |
| Vehicle Control Warning | 01 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | ||
| 02 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | |||
| Vehicle Cooperative Cruise Control | 01 | The vehicle shall be capable of implementing cruise control strategies based upon sensor inputs from the vehicle. | ||
| 02 | The vehicle shall accept configuration inputs from the driver for the cruise control strategy to employ. | |||
| 19 | The Vehicle shall implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. | |||
| 05 | The Connected Vehicle Driver needs to be able to engage and disengage advanced cruise control and adjust control strategies. | Vehicle Control Warning | 04 | The vehicle shall present vehicle control warnings information to the driver in audible or visual forms without impairing the driver's ability to control the vehicle in a safe manner. |
| 05 | The vehicle shall provide warnings to the driver based on information received from other vehicles regarding potentially hazardous road conditions, road hazards, or pending/in-progress vehicle maneuvers. | |||
| Vehicle Cooperative Cruise Control | 16 | The vehicle shall allow the driver to engage or disengage advanced cruise control and adjust control strategies. | ||
Related Sources
| Document Name | Version | Publication Date |
|---|---|---|
| ITS User Services Document | 1/1/2005 | |
| CO-UMP Cooperative Adaptive Cruise Control | 5/31/2021 | |
| AERIS Transformative Concepts and Applications Descriptions | Final | 8/1/2012 |
| Concept Development and Needs Identification for Intelligent Network Flow Optimization (INFLO) ConOps | Draft v3.0 | 6/14/2012 |
Security
In order to participate in this service package, each physical object should meet or exceed the following security levels.
| Physical Object Security | ||||
|---|---|---|---|---|
| Physical Object | Confidentiality | Integrity | Availability | Security Class |
| Basic Vehicle | ||||
| Other Vehicles | Low | High | Moderate | Class 3 |
| Potential Obstacles | ||||
| Roadway Environment | Not Applicable | Low | Low | Class 1 |
| Vehicle | Low | High | Moderate | Class 3 |
| Vehicle Characteristics | ||||
| Vulnerable Road Users | ||||
In order to participate in this service package, each information flow triple should meet or exceed the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Source | Destination | Information Flow | Confidentiality | Integrity | Availability |
| Basis | Basis | Basis | |||
| Basic Vehicle | Vehicle | driver input information | Moderate | High | High |
| Internal vehicle flow that if reverse engineered could enable third party vehicle control. Largely a competitive question, could be set LOW if manufacturer and operator are not concerned with this type of compromise. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | |||
| Basic Vehicle | Vehicle | host vehicle status | Low | Moderate | High |
| Unlikely that this includes any information that could be used against the originator. | This can be MODERATE or HIGH, depending on the application: This is used later on to determine whether a vehicle is likely going to violate a red light or infringe a work zone. This needs to be correct in order for the application to work correctly. | Since this monitors the health and safety of the vehicle and that information is eventually reported to the driver, it should be available at all times as it directly affects vehicle and operator safety. | |||
| Driver | Vehicle | driver input | Moderate | High | High |
| Data included in this flow may include origin and destination information, which should be protected from other's viewing as it may compromise the driver's privacy. | Commands from from the driver to the vehicle must be correct or the vehicle may behave in an unpredictable and possibly unsafe manner | Commands must always be able to be given or the driver has no control. | |||
| Other Vehicles | Vehicle | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the cluster however, which while significant to mobility does not have a direct severe consequence. | |||
| Other Vehicles | Vehicle | vehicle environmental data | Low | Moderate | Moderate |
| Little abusive potential for capturing the information in this flow as designed. Could be moderate if this contains PII related information, but considered for now to not include any PII; DISC: WYO believes Vehicle to Center versions of this flow to be MODERATE as center penetrations could more easily garner aggregate user data that might be used for mischief. | This could be used for safety applications, and in areas of severe weather a corrupted field could have significant consequences; however, any vehicle will use other inputs before triggering automatic safety facilities, so MODERATE should be sufficient. DISC: WYO believes this to be HIGH. | This data is required for the system to operate properly. If this data is not available, the system cannot give accurate warning information. | |||
| Other Vehicles | Vehicle | vehicle location and motion | Not Applicable | High | Moderate |
| This data is intentionally transmitted to everyone via a broadcast. Much of its information content can also be determined via other visual indicators | BSM info needs to be accurate and should not be tampered with | BSM must be broadcast regularly to make data available for other vehicle OBEs, but availability cannot be guaranteed over a wireless medium | |||
| Other Vehicles | Vehicle | vehicle path prediction | Not Applicable | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a cluster. | Vehicle path data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Some vehicle cluster scenarios cannot function without this flow. Worst case is that some vehicles will drop from the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Other Vehicles | Vehicle | vehicle profile | Low | Moderate | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle profile data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Roadway Environment | Vehicle | environmental conditions | Not Applicable | Low | Low |
| Sensor-based information flows by definition have no confidentiality concerns. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | |||
| Roadway Environment | Vehicle | roadway characteristics | Not Applicable | Low | Low |
| Sensor-based information flows by definition have no confidentiality concerns. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | |||
| Vehicle | Basic Vehicle | driver update information | Low | Moderate | Moderate |
| This information is all presented to the vehicle operator. Encrypting this information may make it harder to reverse engineer vehicle systems, and may defeat criminal tracking tools when the vehicle has already been compromised. Unless those scenarios are of concern to the operator or manufacturer, this can safely be set LOW. | Any information presented to the operator of a vehicle should be both accurate and timely. By definition this includes safety information, but given that the driver has other means of learning about most threats, it seems difficult to justify HIGH. If HIGH is warranted, it should apply to both availability and integrity. | Any information presented to the operator of a vehicle should be both accurate and timely. By definition this includes safety information, but given that the driver has other means of learning about most threats, it seems difficult to justify HIGH. If HIGH is warranted, it should apply to both availability and integrity. | |||
| Vehicle | Basic Vehicle | vehicle control | Moderate | High | High |
| Internal vehicle flow that if reverse engineered could enable third party vehicle control. Largely a competitive question, could be set LOW if manufacturer and operator are not concerned with this type of compromise. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | |||
| Vehicle | Driver | driver updates | Not Applicable | Moderate | Moderate |
| This data is informing the driver about the safety of a nearby area. It should not contain anything sensitive, and does not matter if another person can observe it. | This is the information that is presented to the driver. If they receive incorrect information, they may act in an unsafe manner. However, there are other indicators that would alert them to any hazards, such as an oncoming vehicle or crossing safety lights. | If this information is not made available to the driver, then the system has not operated correctly. | |||
| Vehicle | Other Vehicles | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to nearby roadside equipment and vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the cluster however, which while significant to mobility does not have a direct severe consequence. | |||
| Vehicle | Other Vehicles | vehicle environmental data | Low | Moderate | Moderate |
| Little abusive potential for capturing the information in this flow as designed. Could be moderate if this contains PII related information, but considered for now to not include any PII; DISC: WYO believes Vehicle to Center versions of this flow to be MODERATE as center penetrations could more easily garner aggregate user data that might be used for mischief. | This could be used for safety applications, and in areas of severe weather a corrupted field could have significant consequences; however, any vehicle will use other inputs before triggering automatic safety facilities, so MODERATE should be sufficient. DISC: WYO believes this to be HIGH. | This data is required for the system to operate properly. If this data is not available, the system cannot give accurate warning information. | |||
| Vehicle | Other Vehicles | vehicle location and motion | Not Applicable | High | Moderate |
| This data is intentionally transmitted to everyone via a broadcast. Much of its information content can also be determined via other visual indicators | BSM info needs to be accurate and should not be tampered with | BSM must be broadcast regularly to make data available for other vehicle OBEs, but availability cannot be guaranteed over a wireless medium | |||
| Vehicle | Other Vehicles | vehicle path prediction | Not Applicable | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a cluster. | Vehicle path data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Some vehicle cluster scenarios cannot function without this flow. Worst case is that some vehicles will drop from the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Vehicle | Other Vehicles | vehicle profile | Low | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle profile data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
Standards
Currently, there are no standards associated with the physical objects in this service package. For standards related to interfaces, see the specific information flow triple pages. These pages can be accessed directly from the SVG diagram(s) located on the Physical tab, by clicking on each information flow line on the diagram.
System Requirements
| System Requirement | Need | ||
|---|---|---|---|
| 001 | The system shall provide its location with lane-level accuracy to on-board applications. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. | ||
| 002 | The system shall calculate vehicle paths in order to determine if an impending collision is detected. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. | ||
| 003 | The system shall exchange location and motion information with roadside equipment and nearby vehicles. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. | ||
| 004 | The system shall warn the driver of an Emergency Electronic Brake Light (EEBL) Event. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 005 | The system shall determine when its host Vehicle is braking in an emergency fashion and broadcast an Emergency Electronic Brake Light (EEBL) notification. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 006 | The system shall determine the status of host vehicle systems including vehicle speed, heading, yaw, wheelspin, ABS, traction control, and wiper status. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 007 | The system shall determine if vehicle systems status indicates a potentially hazardous road condition. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 008 | The system shall provide an interface through which a vehicle driver can initiate, monitor and terminate automatic control of the vehicle. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 009 | The system shall send appropriate control actions to the vehicle's steering actuators. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 010 | The system shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. | ||
| 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. | ||
| 011 | The system shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. |
| 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. | ||
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. | ||
| 012 | The system shall present vehicle control warnings information to the driver in audible or visual forms without impairing the driver's ability to control the vehicle in a safe manner. | 05 | The Connected Vehicle Driver needs to be able to engage and disengage advanced cruise control and adjust control strategies. |
| 013 | The system shall provide warnings to the driver based on information received from other vehicles regarding potentially hazardous road conditions or road hazards. | 05 | The Connected Vehicle Driver needs to be able to engage and disengage advanced cruise control and adjust control strategies. |
| 014 | The system shall implement cruise control strategies based upon sensor inputs from the vehicle. | 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. |
| 015 | The system shall accept configuration inputs from the driver for the cruise control strategy to employ. | 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. |
| 016 | The system shall exchange movement data (time, location, velocity, forward gap, heading, acceleration) with other vehicles via V2V communications. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 017 | The system shall join a platoon by determining the recommended platoon entry location and the timing for the vehicle to enter a platoon. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 018 | The system shall coordinate acceleration and braking with adjacent vehicles in the same lane (a platoon), maintaining vehicle speed and a safe gap with the vehicle in front of it. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 019 | The system shall communicate the current speed and gap policy to the driver interface system for display to the driver. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 020 | The system shall provide a means for the driver to accept, reject, and modify a given speed and gap policy. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 021 | The system shall exchange data with other vehicles in the platoon to share vehicle status information, roadway condition data, and initiate vehicle actuator controls to maintain safe following distances. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |
| 022 | The system shall determine recommended platoon exit location and timing for the vehicle to exit a platoon. | 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 023 | The system shall determine the appropriate time to restore longitudinal vehicle control to the driver upon CACC platoon exit. | 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 024 | The system shall allow the vehicle to leave the platoon if cruise control is disabled. | 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 025 | The system shall allow the vehicle to leave the platoon based on driver input of desire to leave. | 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 026 | The system shall exchange weather data (time, location, external air temperature, barometric pressure, wiper status, headlight status), road surface data (time, location, traction control status, stability control status, differential wheel speed) with other connected vehicles to support platoon operations. | 03 | The Connected Vehicle needs to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 027 | The system shall engage and disengage advanced cruise control and adjust control strategies. | 05 | The Connected Vehicle Driver needs to be able to engage and disengage advanced cruise control and adjust control strategies. |
| 028 | The system shall implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. | 04 | The Connected Vehicle needs to be able to implement cruise controls strategies in order to provide advanced cruise control in normal vehicle operation. |
| 029 | The system shall provide its location with lane-level accuracy to on-board cooperative cruise control applications. | 01 | The Connected Vehicle needs to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 030 | The system shall collect and process environmental sensor data, including air temperature and rain sensors. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon. |